2026 – Forest Fire Prevention Robot
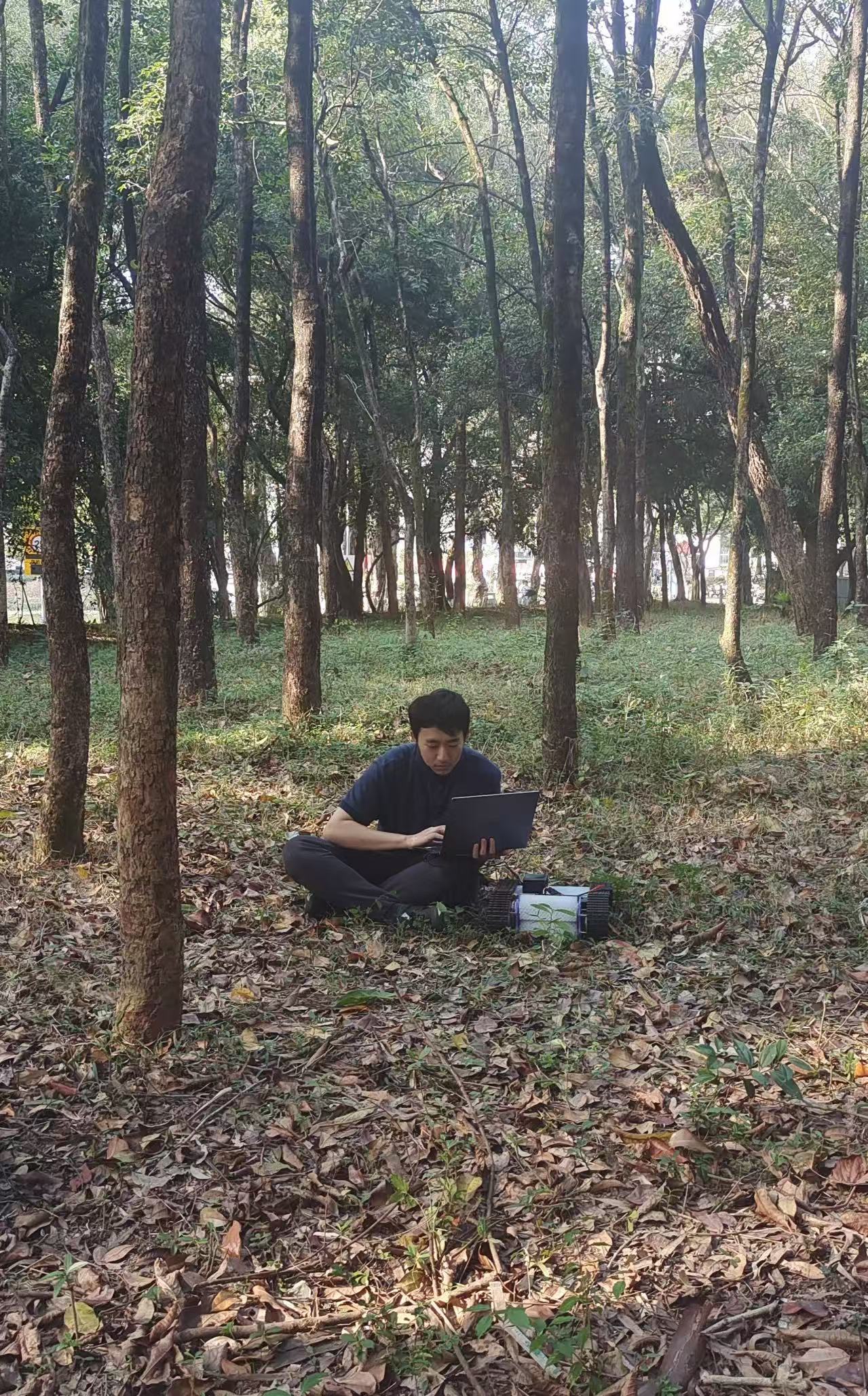
This is a team project, and I served as the team leader. Built to shift from passive fire detection to proactive fire prevention, the robot autonomously navigates forests, collects and crushes dry leaves (a major ignition source), and treats debris with water or retardant.
My Contributions:
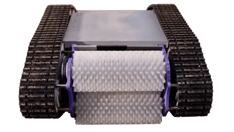
- Led the team in designing the storage bin, chassis, and tank-track drive system
- Oversaw motor assembly, CAN bus wiring, and full system integration
- Directed terrain adaptability, speed, and operational efficiency testing
Tech Used:
YOLOv11 for leaf detection, symmetrical dual tracks, solar power, and IoT remote monitoring.
Outcome:
Clears 2,000 m² per day, operates for more than 2 hours per charge, achieves over 90% detection accuracy, and climbs 30° slopes. This project strengthened my expertise in mechanical design, circuit assembly, and iterative engineering — enabling me to build more robust systems by learning from past project limitations. Additionally, this project won the Bronze Award in the China Region of the Conrad Challenge 2026

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}